Today - 22 March 2025
Now - 02:20:08
Now - 02:20:08
Програміст-розробник андроїдів, що працює на стику кібернетики, психології та біхевіоризму (науки про поведінку), і інженер, що становить алгоритми для промислових роботизованих комплексів, серед основних інструментів якого - вища математика і мехатроніка, працюють в найперспективнішої галузі найближчих років - робототехніки. Роботи, незважаючи на порівняльну новизну терміна, здавна знайомі людству. Ось лише декілька фактів з історії розвитку розумних механізмів.
Ще в міфах Стародавньої Греції згадувалися механічні раби, створені Гефестом для виконання важких і одноманітних робіт. А першим винахідником і розробником людиноподібного робота став легендарний Леонардо да Вінчі. До наших днів збереглися докладні креслення італійського генія, що описують механічного лицаря, здатного імітувати людські рухи руками, ногами, головою.
Створенню перших автоматичних механізмів з програмним управлінням поклали початок в кінці XVΙΙΙ століття європейські годинникові майстри. Найбільш досягли успіху на цьому терені швейцарські фахівці батько і син П'єр-Жак і Анрі Дро. Ними створена ціла серія людиноподібних роботів ("той хлопчик", "художник", "музыкантша") в основі управління якими лежали годинникові механізми. Саме на честь Анрі Дро надалі все програмовані людиноподібні автомати стали називати "андроїдом".
Основи програмування промислових роботів були закладені на зорі XIX століття у Франції. Тут же і були розроблені перші програми для автоматичних текстильних верстатів (прядильних і ткацьких). Стрімко зростаюча армія Наполеона гостро потребувала в обмундируванні і, отже, тканинах. Винахідник з Ліона Жозеф Жаккара запропонував спосіб швидкого перенастроювання ткацького верстата для виробництва різних видів продукції. Нерідко ця процедура вимагала величезної кількості часу, колосальних зусиль і уваги цілого колективу. Суть нововведень зводилася до використання картонних карток з перфорованими отворами. Голки, потрапляючи в просеченные місця, необхідним чином зміщували нитки. Зміна карт швидко проводилася оператором верстата: нова перфокарта - нова програма - новий тип тканини або візерунка. Французька розробка стала прообразом сучасних автоматизованих комплексів, роботів з можливістю програмування.
Більше:

Розширення "Економія трафіку Google Chrome
У статті піде мова про те, як здійснюється економія трафіку в Google Chrome. Цей режим ще називають "Турбо", і його практично кожен спостерігав в таких браузерах, як Yandex Browser або Opera. Проте в Google Chrome даний компонент відсутній, і заощади...

Смайли в "Скайпі" - опис, застосування, секрети
Skype - програма, якою користуються багато людей. Вона призначена спеціально для спілкування і обміну даними. Як і будь-який інший месенджер, "Скайп" оснащений чудовим інтерфейсом і графічними елементами. Тут можна виражати емоції різними способами. ...

Ресурс вогняна сіль в "Скайриме"
Матеріал у грі «Скайрим» вогняна сіль має ряд застосувань, які будуть корисні для гравця. Цей предмет можна дістати кількома способами, які варто знати користувачу. Стаття надає всю потрібну інформацію з цього ресурсу.ВидобутокУ проекті ж...
Ідею, запропоновану Жаккар, з захопленням використовували в своїх автоматичних пристроях багато винахідники:
Перфокарти були основними носіями інформації аж до 60-х років минулого століття.
Своїм назвою інтелектуальні машини зобов'язані чеському драматургу Карелу Чапеку. У п'єсі "R. U. R.", що побачила світ у 1920 році, письменник назвав роботом штучного людини, створеного для важких і небезпечних ділянок виробництва (robota (чеськ.) - каторга). А що відрізняє робота від механізмів та автоматичних пристроїв? На відміну від останніх, робот не тільки виконує певні дії, сліпо слідуючи закладеному алгоритму, але і здатний більш тісно взаємодіяти з навколишнім середовищем і людиною (оператором), адаптувати свої функції при зміні зовнішніх сигналів і умов.
Прийнято вважати, що перший діючий робот був розроблений і реалізований у 1928 році американським інженером Р. Уэнсли. Людиноподібний "залізний інтелектуал" отримав ім'я Герберт Телевокс. На лаври піонерів претендують також вчений-біолог Макото Нісімура (Японія, 1929 р.) і англійська військовослужбовець Вільям Річардс (1928 р.). Створені винахідниками антропоморфні механізми мали схожий функціонал: чи здатні були рухати кінцівками і головою, виконувати голосові та звукові команди, відповідати на прості запитання. Основним призначенням пристроїв була демонстрація науково-технічних досягнень. Черговий виток у розвитку технологій дозволив незабаром створити і перших індустріальних роботів.
Розробка робототехніки являє собою безперервний, поступальний процес. До теперішнього часу сформувалися три яскраво виражених покоління "розумних" машин. Кожне характеризується певними показниками і сферами застосування.
Перше покоління роботів створювалося для вузького виду діяльності. Машини здатні виконувати тільки певну запрограмовану послідовність операцій. Пристрої керування роботами, схемотехніка та програмування практично виключають автономне функціонування та вимагають створення спеціального технологічного простору з необхідним додатковим обладнанням та інформаційно-вимірювальними системами.
Машини другого покоління називають очувствленными, або адаптивними. Програмування роботів здійснюється з урахуванням великого набору зовнішніх і внутрішніх сенсорів. На основі аналізу інформації, що надходить з датчиків,виробляються необхідні керуючі впливи.
І нарешті, третє покоління - інтелектуальні роботи, які здатні:
В основі штучного інтелекту лежить алгоритмічне та програмне забезпечення.
На будь-представницької сучасної виставці роботів різноманіття "розумних" машин здатна вразити не тільки простих обивателів, але і фахівців. А які бувають роботи? Найбільш загальну і змістовну класифікацію запропонував радянський учений А. Е. Кобринський.
За призначенням та виконуваними функціями роботів поділяють на виробничо-промислові та дослідницькі. Перші, у відповідності з характером виконуваних робіт, можуть бути технологічними, підйомно-транспортними, універсальними або спеціалізованими. Дослідні призначені для вивчення галузей та сфер, небезпечних або недоступних для людини (космічний простір, земні надра і вулкани, глибоководні шари світового океану).
За типом управління можна виділити біотехнічні (копіюють, командні, кіборги, інтерактивні та автоматичні), за принципом - жорстко програмовані, адаптивні і гнучко програмовані. Бурхливий розвиток сучасної мікропроцесорної техніки надає розробникам практично безмежні можливості при проектуванні інтелектуальних машин. Але відмінне схемне і конструктивне рішення буде служити лише дорогої оболонкою без відповідного програмного та алгоритмічного забезпечення.
Щоб кремній мікропроцесора зміг взяти на себе функції мозку робота, необхідно "залити" в кристал відповідну програму. Звичайний людський язик не здатний забезпечити чітку формалізацію завдань, точність і надійність їх логічної оцінки. Тому необхідна інформація представляється в певному вигляді з допомогою мов програмування роботів.
відповідно із розв'язуваними завданнями управління виділяють чотири рівня такого спеціально створеного мови:
Робототехніки прагнуть звести програмування роботів до спілкування з ними мовами вищого рівня. В ідеалі оператор ставить завдання: "Зробити збірку двигуна внутрішнього згоряння автомобіля" і очікує від робота повного виконання завдання.
У сучасної робототехніки програмування роботів розвивається по двох векторах: роботоориентированное і проблемно орієнтоване програмування.
Найбільш поширені роботоориентированные мови - AML і AL. Перший розроблений фірмою IBM тільки для управління інтелектуальними механізмами власного виробництва. Другий - продукт фахівців Стенфордського університету (США) - активно розвивається і має суттєвий вплив на формування нових мов цього класу. Професіонал легко розгледить в мові характерні риси Паскаля і Algol'у. Всі мови, орієнтовані на роботів, описують алгоритм, як послідовність дій "розумного" механізму. У зв'язку з цим програма часто виходить дуже громіздкою і незручною у практичній реалізації.
При програмуванні роботів на проблемно-орієнтованих мовах, у програмі вказується послідовність не дій, а цілей або проміжних позицій об'єкта. Найбільш популярним в цьому сегменті є мова AUTOPASS (IBM), в якому стан робочого середовища представлено у вигляді графів (вершини - об'єкти, дуги - зв'язки).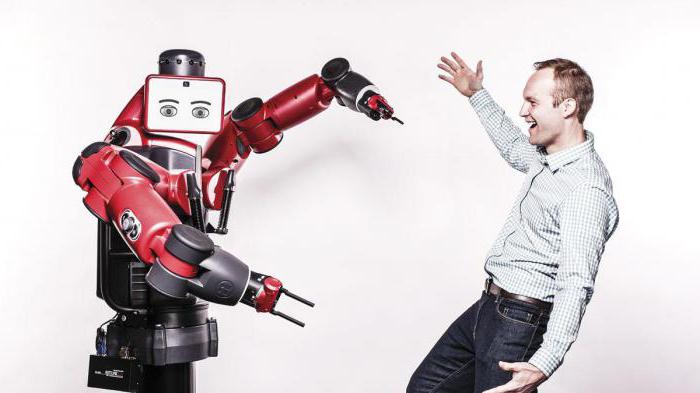
Будь-який сучасний робот являє собою обучаемую і адаптивну систему. Вся необхідна інформація, що включає знання і вміння, передається їй у процесі навчання. Це здійснюється, як безпосереднім занесенням в пам'ять процесора відповідних даних (детальне програмування - семплінг), так і з використанням сенсорів робота (методом наочної демонстрації) - всі рухи і переміщення механізмів робота заносяться в пам'ять і потім відтворюються в робочому циклі. Навчаючись, система перебудовує свої параметри і структуру, формує інформаційну модель зовнішнього світу. Це і є основна відмінність від роботів автоматизованих ліній, промислових автоматів з жорсткою структурою та інших традиційних засобів автоматизації. Перелічені методи навчання мають істотними недоліками. Наприклад, при семплінгу перенастроювання вимагає певного часу іпраці кваліфікованого фахівця.
Досить перспективною виглядає програма для програмування роботів, представлена розробниками Лабораторії інформаційних технологій при Массачусетському технологічному інституті (CSAIL MIT) на міжнародній конференції промислової автоматизації та робототехніки ICRA-2017 (Сінгапур). Створена ними платформа C-LEARN володіє перевагами обох методів. Вона надає роботу бібліотеки елементарних рухів з заданими обмеженнями (наприклад, зусилля хвата для маніпулятора відповідно з формою і жорсткістю деталі). У той же час, оператор демонструє роботу ключові руху в тривимірному інтерфейсі. Система, виходячи з поставленої задачі, формує послідовність операцій для виконання робочого циклу. C-LEARN дозволяє переписати існуючу програму для робота іншої конструкції. Оператору при цьому не потрібні поглиблені знання в області програмування.
Фахівці Оксфордського університету попереджають, що в найближчі два десятиліття машинні технології замінять більше половини сьогоднішніх робочих місць. Дійсно, роботи давно вже працюють не тільки на небезпечних і важких ділянках. Наприклад, програмування торгових роботів значно потіснило брокерів-людей на світових біржах. Кілька слів про штучний інтелект.
В уявленні пересічного громадянина це антропоморфний робот, здатний замінити людини в багатьох сферах життя. Почасти так і є, але більшою мірою штучний інтелект - це самостійна галузь науки і технології, з допомогою комп'ютерних програм, що моделює мислення "Homo sapiens", роботу його мозку. На сьогоднішньому етапі розвитку ШІ більше допомагає людям, розважає їх. Але, за прогнозами експертів, подальший прогрес в області робототехніки і штучного інтелекту може поставити перед людством цілий ряд морально-етичних та юридичних питань.
В цьому році на виставці роботів в Женеві найдосконаліший андроїд Софія заявила, що вчиться бути людиною. У жовтні Софія вперше в історії штучного інтелекту була визнана громадянкою Саудівської Аравії з повноцінними правами. Перша ластівка?
В 2017 році фахівці цифрової індустрії відзначили кілька видатних рішень у сфері технологій віртуальної реальності. Не залишилася осторонь і робототехніка. Дуже перспективним виглядає напрямок удосконалює управління складним робомеханизмом через віртуальний шолом (VR). Експерти пророкують затребуваність такої технології в бізнесі та промисловості. Ймовірні сценарії використання:
Ще один популярний тренд - connected car. Зовсім недавно представники гіганта Apple заявили про старт розробок власного "безпілотника". Все більше фірм висловлюють свою зацікавленість у створенні машин, здатних самостійно переміщатися з пересіченим трасах, зберігаючи вантажі та обладнання.
Зростаюча складність алгоритмів програмування роботів і машинного навчання пред'являє підвищені вимоги до обчислювальних ресурсів і, отже, до "заліза". Мабуть, оптимальним виходом у цьому випадку буде підключення пристроїв до хмарної інфраструктури.
Важливий напрямок - когнітивна робототехніка. Стрімке зростання кількості "розумних" машин змушує розробників все частіше замислюватися про те, як навчити роботів злагоджено взаємодіяти.
Article in other languages:
AR: https://tostpost.com/ar/computers/10650-programming-of-robots-the-development-of-robotics.html
BE: https://tostpost.com/be/kamputary/18694-pragramavanne-robata-raspraco-ka-robatatehn-k.html
En: https://tostpost.com/computers/25354-programming-of-robots-the-development-of-robotics.html
HI: https://tostpost.com/hi/computers/10476-programming-of-robots-the-development-of-robotics.html
JA: https://tostpost.com/ja/computers/10469-programming-of-robots-the-development-of-robotics.html
KK: https://tostpost.com/kk/komp-yuterler/18762-ba-darlamalau-robottar-z-rleu-robototehnika.html
PL: https://tostpost.com/pl/komputery/19349-programowanie-robot-w-rozw-j-robotyki.html
TR: https://tostpost.com/tr/bilgisayarlar/18698-programlama-robotlar-geli-tirme-robotik.html
ZH: https://tostpost.com/zh/computers/4194-programming-of-robots-the-development-of-robotics.html

Alin Trodden - автор статті, редактор
"Привіт, Я Алін Тродден. Я пишу тексти, читаю книги і шукаю враження. І я непогано вмію розповідати вам про це. Я завжди радий брати участь у цікавих проектах."
Новини

Робота з образами: чим відкрити ISO
Робота з файлами ISO насправді не так страшна й незрозуміла, як здається на перший погляд. Сьогодні ми з вами розглянемо, ніж відкрити ISO і як з ним далі працювати.Для початку трохи теорії. Файли формату ISO – це точна копі...
Кегль шрифту – це розмір рядка, в якому знаходиться буква. У нього входить як висота найвищого знака (рядкового), виносних елементів (нижніх або верхніх зарубок), так і заплечиків. Останні існують для того, щоб букви, розташ...

Російський браузер «Супутник»: відгуки користувачів
Не так давно російська компанія «Ростелеком» розробила власне засіб доступу в Інтернет в поєднанні з пошуковою системою. Звичайно ж, це браузер «Супутник». Відгуки про новому софті, в принципі, досить супер...

Як очистити cookies в декількох популярних браузерах
Людині, лише в загальних рисах знайомому з використанням ресурсів глобальної мережі Інтернет, на перший погляд може здатися, що, крім настирливої реклами на сайтах, немає ніяких особливостей: обрана програма для перегляду сторінок...

Що робити, якщо не запускаються EXE-файли?
Файли, що мають розширення EXE, є виконуваними файлами для більшості додатків, які ми використовуємо щодня. Встановлюючи будь-яку програму на комп'ютер, ми створюємо для неї на робочому столі ярлик, щоб полегшити пошук. Але ...
Найпростіший відповідь на питання: "Як створити таблицю в Excel?"
У даній статті ми розглянемо процес створення електронних таблиць. Найпоширеніший редактор для цього - MS Office Excel. Розглянута програма є офісним додатком, а встановлення її виробляється автоматично з усім пакетом офісних прог...













Примітка (0)
Ця стаття не має коментарів, будьте першим!