Today - 21 March 2025
Now - 20:26:47
Now - 20:26:47
Programista-twórca androidów, działający na styku cybernetyki, psychologii i behawioryzmu (nauk o zachowaniu), inżynier, stanowiący algorytmy robotów przemysłowych kompleksów, wśród podstawowych narzędzi którego - wyższa matematyka i mechatronika, pracują w najniższej przyszłościowej branży najbliższych lat - robotyka. Roboty, pomimo względnej nowości terminu, od dawna znane ludzkości. Oto tylko kilka faktów z historii rozwoju inteligentnych mechanizmów.
Jeszcze w mitach Starożytnej Grecji pojawiły się mechaniczne niewolnicy, utworzone Гефестом do wykonywania ciężkich i monotonnych prac. A pierwszym wynalazcą i twórcą robota humanoidalnego stał się legendarny Leonardo da Vinci. Do naszych czasów zachowały się dokładne rysunki włoskiego geniusza, opisujące mechanicznego rycerza, który mógłby naśladować ludzkie ruchy rękami, nogami, głową.
Tworzenia pierwszych automatycznych mechanizmów z zainstalowanym systemem dały początek w końcu XV&Jota;&Jota;&Jota; wieku europejskie zegarmistrzów. Najczęściej udawali się w tej dziedzinie szwajcarscy specjaliści, ojciec i syn, Pierre-Jacques i Henri Draw. Z nich powstała cała seria humanoidalnych robotów ("nagrywarka chłopiec", "rysownik", "музыкантша") w oparciu o zarządzanie którymi leżały strefy mechanizmy. To właśnie na cześć Henri Draw w przyszłości wszystkie programowalne ludzkie-podobne automaty zaczęto nazywać "андроидами".
Podstawy programowania robotów przemysłowych zostały założone na początku XIX wieku we Francji. Tu i zostały opracowane pierwsze programy do automatycznych maszyn włókienniczych (przędzenia i tkackich). Szybko rosnąca armia Napoleona pilnie potrzebowała w umundurowaniu i dlatego tkankach. Wynalazca z Lyonu Joseph Жаккар zaproponował sposób szybkiej migracji krosna do produkcji różnych rodzajów produktów. Często procedura ta wymagała ogromnej ilości czasu, ogromnych wysiłków i uwagi całego zespołu. Istotą innowacji sprowadza się do korzystania z tekturowych kartek z dziurkami. Igły, dotarcie do просеченные miejsca, konieczne sposób смещали nici. Zmiana karty szybko przeprowadzono przez operatora maszyny: nowa перфокарта - nowy program - nowy typ materiału lub wzoru. Francuska opracowanie stała się pierwowzorem współczesnych zautomatyzowanych kompleksów, robotów z możliwością programowania.
Bardziej:

Co to jest Ethernet – główne zalety internetu-sieci
O tym, co to jest Ethernet, okazało się w latach siedemdziesiątych XX wieku. Wynalazł ten typ sieci lokalnej Robert Metcalfe, który pracował w tym czasie na firmy Xerox. W latach 70-tych Metcalf otworzył własną firmę 3com, gdzie zakończyła się opraco...

UAC: wyłączyć lub ułaskawienie
W odległej już od nas w 2006 roku światowa komputerowa opinia publiczna była wstrząsa wyjściem SYSTEMU Windows Vista. Na nowy system od razu runął niesamowity lawinę negatywnych, powód dla którego nadal zostały.Jednym z nich była opcja UAC, wyłączyć ...

Jak dodać muzykę w iTunes: trzy proste sposoby
Telefony komórkowe kilku lat przekształciliśmy się z zwykłego narzędzia komunikacji w gadżety, które zastępują konsole do gier, książki, wideo i odtwarzaczy audio. A jeśli nie tak dawno muzykę można było po prostu pobrać z witryn internetowych i usta...
Pomysł zaproponowany przez Жаккаром, z zachwytem używali w swoich automatycznych urządzeniach wielu wynalazców:
Karty dziurkowane były głównymi nośnikami informacji, aż do lat 60-tych ubiegłego wieku.
Jego nazwie inteligentne maszyny muszą czeskiego w roli głównej Карелу Чапеку. W sztuce "R. U. R.", увидевшей światło w 1920 roku, pisarz nazwał robotem sztucznego człowieka, stworzonego dla ciężkich i niebezpiecznych odcinków produkcji (robota (чешск.) - Katorga). A co odróżnia robota od mechanizmów i automatycznych urządzeń? W przeciwieństwie do tych ostatnich, robot nie tylko wykonuje pewne czynności, ślepo wykonując заложенному algorytmu, ale i jest w stanie lepiej współpracować z otoczeniem i człowiekiem (przez operatora), dostosować swoje funkcje przy zmianie sygnałów zewnętrznych i warunków.
Uważa się, że pierwszy działający robot został zaprojektowany i wdrożony w 1928 roku przez amerykańskiego inżyniera P. Уэнсли. Humanoidalnych "iron intelektualista" otrzymał imię Herbert Телевокс. Laury pionierów twierdzą, że także naukowiec-biolog Przez Makoto (Japonia, 1929 r.) i angielski żołnierz William Richards (1928 r.). Utworzone przez wynalazców antropomorficzne mechanizmy miały podobną funkcjonalność: byli w stanie poruszać kończynami i głową, wykonywać połączenia głosowe i dźwiękowe drużyny, odpowiadać na proste pytania. Podstawowym przeznaczeniem urządzeń była prezentacja osiągnięć naukowych i technologicznych. Kolejny etap w rozwoju technologii pozwolił w krótkim czasie stworzyć i pierwszych robotów przemysłowych.
Rozwój robotyki stanowi ciągły, proces translacyjny. Do tej pory powstały trzy wyraźne generacji "inteligentnych maszyn. Każde charakteryzuje się określonymi wskaźnikami i obszary zastosowania.
Pierwsza generacja robotów tworzono dla wąskiego rodzaju działalności. Maszyny są w stanie wykonać tylko określoną zaprogramowaną sekwencję operacji. Urządzenia sterowania robotami, obwodów i programowanie praktycznie wykluczają samodzielne prowadzenie i wymagają tworzenia specjalnego technologicznego przestrzeni z niezbędnym wyposażeniem dodatkowym i systemów informacyjno-pomiarowych.
Maszyny drugiej generacji nazywa очувствленными, lub adaptacyjnych. Programowanie robotów odbywa się z uwzględnieniem dużego zestawu wewnętrznych i zewnętrznych czujników. Na podstawie analizy informacji pochodzących z czujników,wytwarzane są odpowiednie sygnały sterujące.
I wreszcie, trzecia generacja - inteligentne roboty, które są w stanie:
W oparciu o sztucznej inteligencji leży algorytmiczna i oprogramowanie.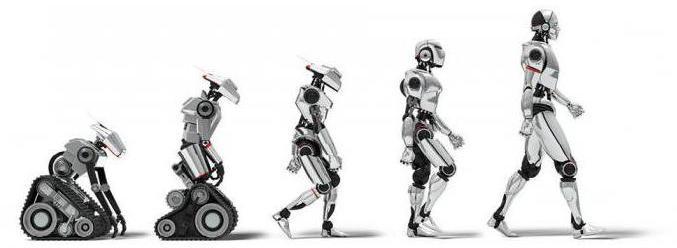
Na każdej reprezentatywnej nowoczesnej wystawie robotów różnorodność inteligentnych maszyn jest w stanie trafić nie tylko zwykłych ludzi, ale i specjalistów. A jakie są roboty? Najbardziej ogólną i znacząco klasyfikację zaproponował radziecki naukowiec A. E. Кобринский.
Zgodnie Z przeznaczeniem i wykonywanych funkcji robotów są podzielone na produkcyjno-przemysłowe i badawcze. Pierwsze, zgodnie z charakterem wykonywanych prac, mogą być technologicznych, dach przesuwno-transportowymi, uniwersalne lub wyspecjalizowane. Badawcze przeznaczone do nauki obszarów i dziedzin, niebezpiecznych i niedostępnych dla człowieka (przestrzeń, wnętrzności ziemi i wulkany, głębokie warstwy oceanu światowego).
Według rodzaju sterowania można wyróżnić биотехнические (kopiujące, drużynowe, cyborgi, interaktywne i automatyczne), na zasadzie - sztywno programowalne, adaptacyjne i elastycznie programowalne. Szybki rozwój nowoczesnej technice mikroprocesorowej usług projektantom niemal nieograniczone możliwości przy projektowaniu inteligentnych maszyn. Ale świetny projekt obwodu i konstruktywne rozwiązanie będzie służyć tylko kosztowne powlekane bez odpowiedniego oprogramowania i algorytmicznego oprogramowanie.
Aby krzem mikroprocesora był w stanie wziąć na siebie funkcje mózgu robota, trzeba "wlać" w kryształ odpowiedni program. Zwykły ludzki język nie jest w stanie zapewnić wyraźne formalizację zadań, dokładność i niezawodność ich logicznej oceny. Dlatego wymagane informacje przedstawia się w określonej formie z pomocą języków programowania robotów.
Zgodnie z решаемыми zadaniami zarządzania wyróżniają cztery poziomy tego specjalnie utworzonego języka:
Robotyki starają się ograniczyć programowanie robotów do komunikowania się z nimi w językach wyższego poziomu. Najlepiej operator stawia zadanie: "Produkować złożenie silnika spalinowego samochodu" i oczekuje od robota pełnego wykonania zadania.
W nowoczesnej robotyka, programowanie robotów rozwija się w dwóch wektorów: роботоориентированное i problemowo zorientowane programowanie.
Najczęstsze роботоориентированные języki - AML i AL. Pierwszy, opracowany przez firmę IBM tylko do sterowania inteligentnymi maszynami własnej produkcji. Drugi produkt specjalistów sekcji wiadomości uniwersytetu stanforda (USA) - aktywnie rozwija się i ma znaczący wpływ na kształtowanie się nowych języków tej klasy. Profesjonalny łatwo widzi w języku charakterystyczne cechy Pascala i Алгола. Wszystkie języki zorientowane na roboty, opisują algorytm, jako sekwencja działań "inteligentnego" mechanizmu. W związku z tym program często wychodzi bardzo nieporęczne i niewygodne w praktycznej realizacji.
Podczas programowania robotów na problemowo zorientowanych języków, w programie podana jest sekwencja działań, celów lub pośrednich pozycji obiektu. Najbardziej popularne w tym segmencie jest język AUTOPASS (IBM), w którym stan środowiska przedstawiono w postaci wykresów (wierzchołki obiektów, łuków - komunikacji).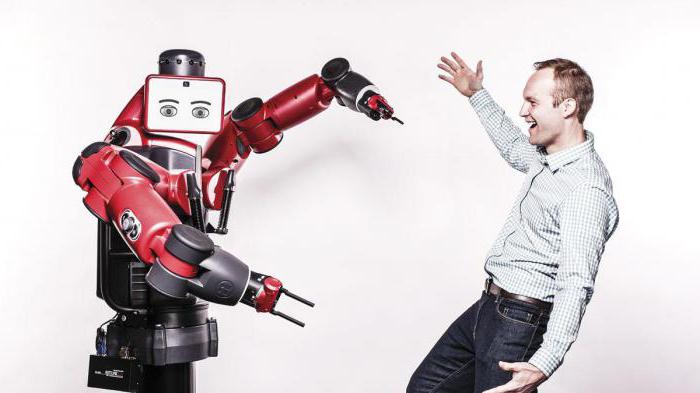
Każdy nowoczesny robot jest обучаемую i adaptacyjny system. Wszystkie niezbędne informacje, obejmująca wiedzę i umiejętności, przekazywane jej w procesie uczenia się. Odbywa się to, jak bezpośrednim wejściem do pamięci procesora odpowiednich danych (szczegółowy programowanie - семплинг), jak i z użyciem czujników robota (metodą wizualną prezentację) - wszystkie ruchy i przemieszczenia mechanizmów robota są zapisywane w pamięci i następnie są odtwarzane w jednym cyklu roboczym. Ucząc się, system odbudowuje swoje parametry i strukturę, tworzy informacyjną model świata zewnętrznego. To jest główna różnica roboty od zautomatyzowanych linii przemysłowych automatów z sztywnej konstrukcji i innych tradycyjnych środków automatyzacji. Wymienione metody nauczania mają istotne wady. Na przykład, podczas семплинге migracja wymaga określonego czasu ipracy wykwalifikowanego technika.
Bardzo perspektywicznym wygląda program do programowania robotów, przedstawione przez twórców Laboratorium technologii informatycznych w mit (CSAIL MIT) na międzynarodowej konferencji automatyki przemysłowej i robotyki ICRA-2017 (Singapur). Stworzony przez nich platforma C-LEARN ma zalety obu metod. Zapewnia robota biblioteki elementarnych ruchów z określonymi ograniczeniami (na przykład, siła przyczepności do ramienia, zgodnie z formą i sztywność części). W tym samym czasie, operator przedstawia robota słowa jazdy w trójwymiarowym interfejsie. System, na podstawie zadania, tworzy sekwencję operacji do wykonania cyklu roboczego. C-LEARN pozwala nadpisać istniejącego programu dla robota innej konstrukcji. Operator nie wymaga dogłębnej wiedzy w zakresie programowania.
Eksperci Oxford university ostrzegają, że w ciągu najbliższych dwóch dekad maszynowe technologie zastąpią ponad połowa dzisiejszych miejsc pracy. Naprawdę, roboty już dawno pracują nie tylko w niebezpiecznych i trudnych odcinkach. Na przykład, programowanie robotów handlowych znacznie потеснило brokerów-osoby na światowych giełdach. Kilka słów o sztucznej inteligencji.
W widoku laika to antropomorficzny robot, który miał zastąpić człowieka w wielu dziedzinach życia. Częściowo tak jest, ale w większym stopniu sztuczna inteligencja - to oddzielna dziedzina nauki i technologii, z pomocą programów komputerowych, modelujący myślenie "Homo sapiens", pracę jego mózgu. Na dzisiejszym etapie rozwoju AI więcej pomaga ludziom, bawi ich. Ale, według prognoz ekspertów, dalszy postęp w dziedzinie robotyki i sztucznej inteligencji może postawić przed ludzkością wiele moralno-etycznych i prawnych.
W tym roku na wystawie robotów w Genewie najbardziej doskonały android Zofia powiedziała, że uczy się być człowiekiem. W październiku Sofia po raz pierwszy w historii sztucznej inteligencji została uznana za obywatela Arabii Saudyjskiej z pełnymi uprawnieniami. Pierwsza jaskółka?
W 2017 roku specjaliści z branży cyfrowej zauważyć kilka wybitnych rozwiązań w zakresie technologii wirtualnej rzeczywistości. Nie pozostała na uboczu i robotyka. Bardzo obiecująco wygląda kierunek совершенствующее zarządzanie trudne робомеханизмом przez wirtualny hełm (VR). Eksperci przewidują, że popyt na taka technologie w biznesie i przemyśle. Prawdopodobne scenariusze użycia:
Jeszcze jeden popularny trend - connected car. Niedawno przedstawiciele giganta Apple poinformowała o starcie rozwoju własnego "drona". Coraz więcej firm wyrażają swoje zainteresowanie w tworzeniu maszyn, zdolnych samodzielnie poruszać się po przekraczane trasach, zachowując towary i sprzęt.
Rosnąca złożoność algorytmów programowania robotów i uczenia maszynowego stawia wysokie wymagania co do zasobów obliczeniowych i, w konsekwencji, do "żelaza". Wydaje się, że optymalnym wyjściem w tym przypadku będzie podłączenie urządzeń do infrastrukturę chmurową.
Ważne kierunek - terapia poznawczo-robotyka. Gwałtowny wzrost liczby inteligentnych maszyn sprawia, że deweloperzy coraz częściej myśleć o tym, jak nauczyć roboty sprawnie współpracować.
Article in other languages:
AR: https://tostpost.com/ar/computers/10650-programming-of-robots-the-development-of-robotics.html
BE: https://tostpost.com/be/kamputary/18694-pragramavanne-robata-raspraco-ka-robatatehn-k.html
En: https://tostpost.com/computers/25354-programming-of-robots-the-development-of-robotics.html
HI: https://tostpost.com/hi/computers/10476-programming-of-robots-the-development-of-robotics.html
JA: https://tostpost.com/ja/computers/10469-programming-of-robots-the-development-of-robotics.html
KK: https://tostpost.com/kk/komp-yuterler/18762-ba-darlamalau-robottar-z-rleu-robototehnika.html
TR: https://tostpost.com/tr/bilgisayarlar/18698-programlama-robotlar-geli-tirme-robotik.html
UK: https://tostpost.com/uk/komp-yuteri/18934-programuvannya-robot-v-rozrobka-robototehn-ki.html
ZH: https://tostpost.com/zh/computers/4194-programming-of-robots-the-development-of-robotics.html

Alin Trodden - autor artykułu, redaktor
"Cześć, jestem Alin Trodden. Piszę teksty, czytam książki, Szukam wrażeń. I nie jestem zły w opowiadaniu ci o tym. Zawsze chętnie biorę udział w ciekawych projektach."
Nowości

Siódma wersja systemu Windows od momentu jej wyjścia przedstawił użytkownikom wiele niespodzianek. Tak, wielu odkryli w systemie (a dokładniej w «Menedżerze urządzeń») sterownik do karty tunelowania Teredo firmy Micros...

"Autocad" - co to jest? Opis programu
Nowa wersja najpopularniejszego systemu automatycznego projektowania AutoCAD 2017 pojawiła się 21 marca 2016 roku, a najbardziej stabilne stała się "Autocad 2016". Za pomocą tego oprogramowania w naszym kraju dostępny jest duża cz...

Jak podłączyć joystick od PC do PS3: porady, wskazówki, instrukcje
Gry na komputerze i konsolach do gier stały się łatwiejsze dzięki геймпадам. Zdalne sterowanie pozwala się zrelaksować i grać komfortowo. Często gracze zastanawiają się, jak podłączyć joystick od PC do PS3 i na odwrót. Dalej opisu...

Jego Wysokość - sterownik do karty sieciowej
Nowoczesny właścicieli komputerów trudno sobie wyobrazić, że jakieś 5-10 lat temu płyta główna ze zintegrowaną kartą sieciową była raczej rzadkością niż regułą. Obecnie sytuacja radykalnie się zmieniła, co nie może nie cieszyć, bo...

Szczegółowo o tym, jak wyłączyć program antywirusowy Microsoft Security Essentials
W tym artykule przedstawiona instrukcja dla użytkowników, którzy zastanawiają się, jak wyłączyć program antywirusowy Microsoft Security Essentials. Cała procedura trwa kilka sekund. O szczegółach porozmawiamy dalej.Co to za progra...

Jak ściągać gry z torrentów: instrukcja
Wszyscy ludzie kochają gratisy. Można zaprzeczyć, że jest to oświadczenie, twierdzić, że nie takie i za wszystko zawsze gotowi zapłacić. Ale czy to zrobić? Nawet włażąc do internetu i w tym dziecku bajki na "Youtube". To samo możn...













Uwaga (0)
Ten artykuł nie ma komentarzy, bądź pierwszy!